I have made the final touches and the car has finally been made.
What do I think about the project?
Well, to be honest, this kind of project requires a "version 2, version 3 etc..". You learn as you go alone and improve the next time you make the same project.
For example, I wish I had a battery gauge bar that will indicate the level of battery charge that is left in the battery for knowing when it's time to charge
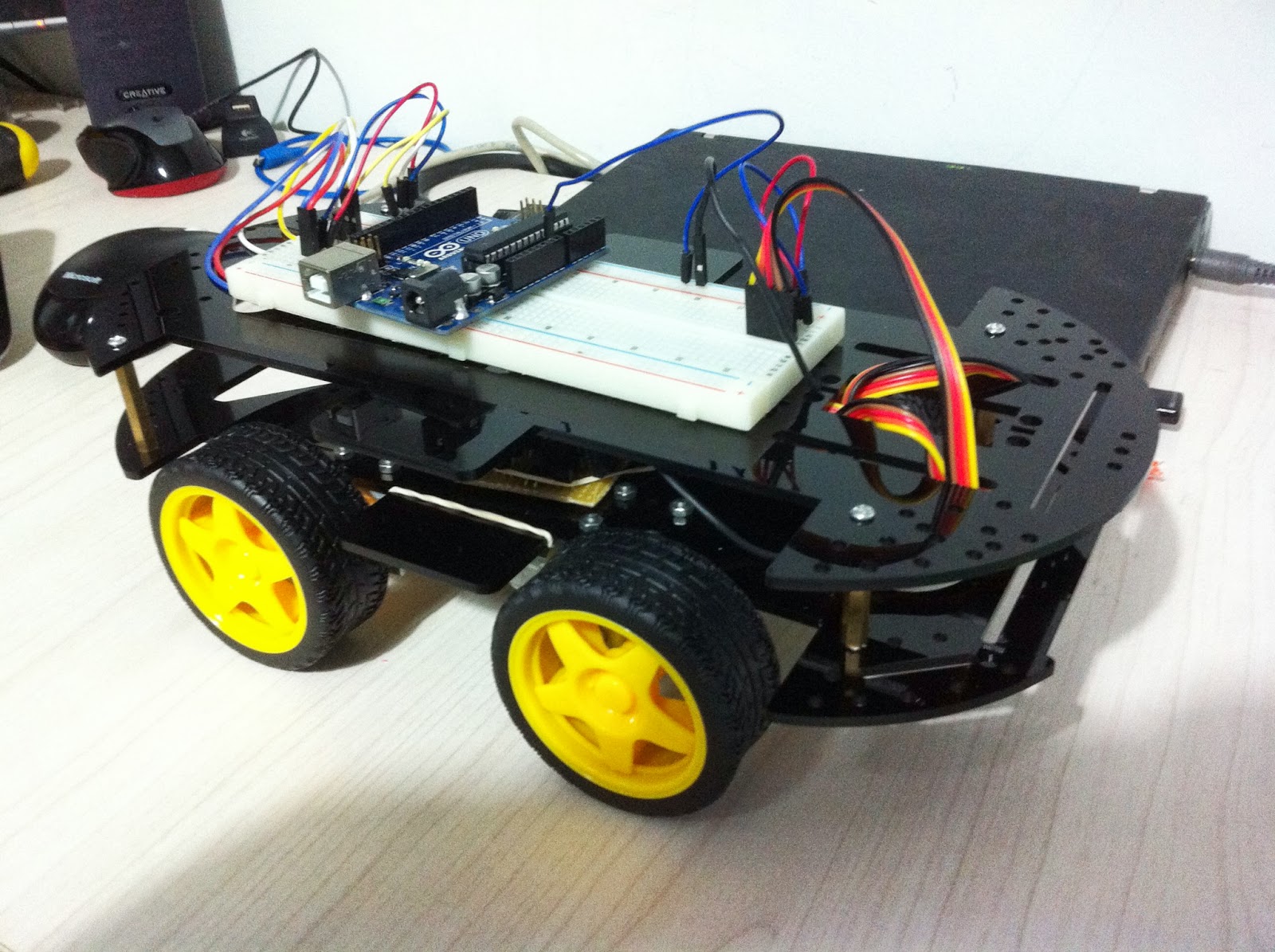
Too many connections
To ease the development process of the car I had to separate the full PCB into four main circuit which were connected to each other via dupont connectors. this causes the interiour of the car, well, look like a mesh of spaghetti. I should have connected the boards together and created only one PCB that housed all of these four circuits. The circuits are:
1. The H-BRIDGE for the car wheels
2. The H-BRIDGE and Missile control for the rocket launcher
3. The main board which contains the main processor.
4. The voltage regulator for the IC chips.
At the end, all in all, the project is a success and lots of fun. Now to the next project.
One last thing, checkout the test drive :).
To ease the development process of the car I had to separate the full PCB into four main circuit which were connected to each other via dupont connectors. this causes the interiour of the car, well, look like a mesh of spaghetti. I should have connected the boards together and created only one PCB that housed all of these four circuits. The circuits are:
1. The H-BRIDGE for the car wheels
2. The H-BRIDGE and Missile control for the rocket launcher
3. The main board which contains the main processor.
4. The voltage regulator for the IC chips.
At the end, all in all, the project is a success and lots of fun. Now to the next project.
One last thing, checkout the test drive :).